

Toyota Unveils Third Generation Humanoid Robot T-HR3 +VIDEO
 Toyota Master Maneuvering System and T-HR3 Partner Robot |
Remote, safe, smooth operation of robot enabled through new, advanced Torque Servo Module and Master Maneuvering System
TOYOTA CITY, Japan November 21, 2017: Toyota Motor Corporation (Toyota) today revealed T-HR3, the company's third generation humanoid robot. Toyota's latest robotics platform, designed and developed by Toyota's Partner Robot Division, will explore new technologies for safely managing physical interactions between robots and their surroundings, as well as a new remote maneuvering system that mirrors user movements to the robot.
T-HR3 reflects Toyota's broad-based exploration of how advanced technologies can help to meet people's unique mobility needs. T-HR3 represents an evolution from previous generation instrument-playing humanoid robots, which were created to test the precise positioning of joints and pre-programmed movements, to a platform with capabilities that can safely assist humans in a variety of settings, such as the home, medical facilities, construction sites, disaster-stricken areas and even outer space.
"The Partner Robot team members are committed to using the technology in T-HR3 to develop friendly and helpful robots that coexist with humans and assist them in their daily lives. Looking ahead, the core technologies developed for this platform will help inform and advance future development of robots to provide ever-better mobility for all," said Akifumi Tamaoki, General Manager, Partner Robot Division.
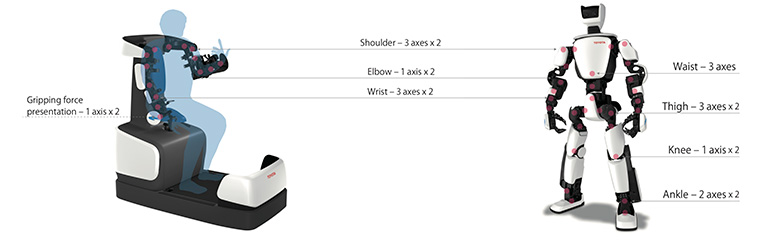
T-HR3 is controlled from a Master Maneuvering System that allows the entire body of the robot to be operated instinctively with wearable controls that map hand, arm and foot movements to the robot, and a head-mounted display that allows the user to see from the robot's perspective. The system's master arms give the operator full range of motion of the robot's corresponding joints and the master foot allows the operator to walk in place in the chair to move the robot forward or laterally. The Self-interference Prevention Technology embedded in T-HR3 operates automatically to ensure the robot and user do not disrupt each other's movements.
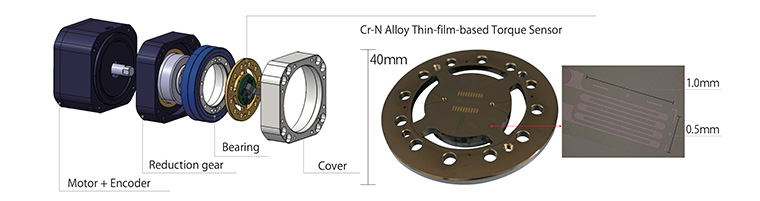
Onboard T-HR3 and the Master Maneuvering System, motors, reduction gears and torque sensors (collectively called Torque Servo Modules) are connected to each joint. These modules communicate the operator's movements directly to T-HR3's 29 body parts and the Master Maneuvering System's 16 master control systems for a smooth, synchronized user experience. The Torque Servo Module has been developed in collaboration with Tamagawa Seiki Co., Ltd. and NIDEC COPAL ELECTRONICS CORP. This technology advances Toyota's research into safe robotics by measuring the force exerted by and on T-HR3 as it interacts with its environment and then conveying that information to the operator using force feedback.
The Torque Servo Module enables T-HR3's core capabilities: Flexible Joint Control, to control the force of contact the robot makes with any individuals or objects in its surrounding environment; Whole-body Coordination and Balance Control, to maintain the robot's balance if it collides with objects in its environment; and Real Remote Maneuvering, to give users seamless and intuitive control over the robot. These functions have broad implications for future robotics research and development, especially for robots that operate in environments where they must safely and precisely interact with their surroundings.
Since the 1980s, Toyota has been developing industrial robots to enhance its manufacturing processes. Partner Robot has utilized the insights from that experience and built on Toyota's expertise in automotive technologies to develop new mobility solutions that support doctors, caregivers and patients, the elderly, and people with disabilities.
T-HR3 will be featured at the upcoming International Robot Exhibition 2017 at Tokyo Big Sight from November 29 through December 2.
T-HR3 TECHNICAL OVERVIEW
Torque Servo Module
The Torque Servo Module is the combination of a supersensitive and highly-rigid Cr-N Alloy Thin-film-based Torque Sensor, motor and reduction gear.
Master Maneuvering System
T-HR3 is controlled from a Master Maneuvering System that allows the entire body of the robot to be operated instinctively with wearable controls that map hand, arm and foot movements to the robot,
and a head-mounted display that allows the user to see from the robot's perspective.
Installation of Torque Servo Modules
Core Capabilities
- Flexible Control Technology to control the force of contact the robot makes with any individuals or objects in its surrounding environment.
- Whole-body Coordination and Balance Control Technology to maintain the robot's balance if it collides with objects in its environment.
- Real Remote Maneuvering Technology to give users seamless and intuitive control over the robot.